U Amsterdamu testiran samovozeći čamac Roboat II
Hi-techLifestyleSvetVestiZanimljivosti
2.11.2021 19:37 Autor: Redakcija Biznis.rs

U globalno utrkivanje kompanija ko će pre dizajnirati i proizvesti sjajne, sigurne i brze samovozeće automobile sada su uključeni i skuteri, golf kolica, pa čak i invalidska kolica. Nedavno, u nju su se uključila i plovila, piše na sajtu World Economic Forum.
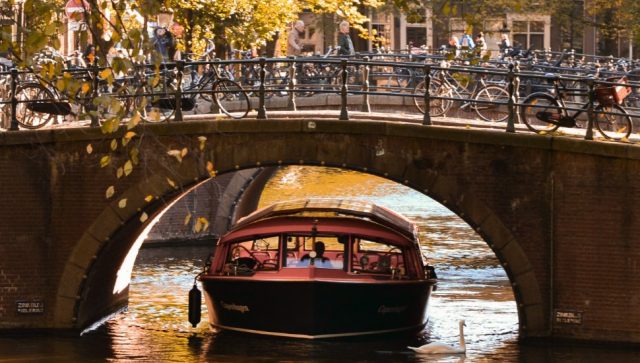
Istraživači iz Laboratorije za kompjuterska istraživanja i rad na veštačkoj inteligenciji (CSAIL) Tehnološkog instituta u Masačusetsu, koji u saradnji sa laboratorijom Senseable City Lab rade već pet godina na projektu čiji je cilj razvijanje flote samovozećih čamaca za holandski grad Amsterdam, nedavno su grupi plovila dodali čamac po imenu Roboat II. Kako navode, čamac je dug oko dva metra i može služiti i za prevoz putnika.
Zajedno sa institutom Advanced Metropolitan Solutions iz Amsterdama, CSAIL tim je takođe osmislio kontrolne i navigacione algoritme koji omogućavaju komunikaciju među čamcima.
Kako navodi profesorka sa Tehnološkog instituta u Masačusetsu Danijela Rus (Daniela Rus), cilj njenog tima je da razvije flote robo-čamaca koji će služiti za dostavu i prevoz ljudi.
Samovozeći čamci su do sada bili sposobni da prevezu manje objekte. Prevoz ljudi za sada deluje kao teoretska mogućnost, uzimajući u obzir trenutnu veličinu plovila. Roboat II je tek prototip koji treba nadograditi.
Trenutno je u izgradnji treća verzija čamca, koja će za razliku od prethodne dve biti u “punoj veličini”. Ova verzija će biti duga četiri metra i moći će da preveze od četiri do šest putnika.
Roaboat II je gotovo tri sata plovio kanalima Amsterdama pomoću algoritama za navigaciju, sakupljajući podatke, pa se vratio na poziciju sa koje je otpočeo plovidbu. Jedina greška u toku cele plovidbe bila je ta što je startnu poziciju promašio za 17 centimetara.
Timovi CSAIL i Senseable City Lab, predvođeni postdoktorandom Vejom Vangom (Wei Wang), osmislili su novu strategiju za kontrolu robotske koordinacije. Njihova namera je da povežu čamce u “kompoziciju” koja će moći da se koristi za kolektivni transport, ali i obavljanje drugih zadataka.
Sistem na kome rade sastoji se iz senzora, kontrola i uparenih kompjutera, a inspirisan je načinom na koji mravi transportuju hranu bez komunikacije. Preciznije rečeno, bez direktne komunikacije. Prema ovom principu, čamac predvodnik inicira kretanje prema odredištu, a potom ostali robo-čamci procenjuju njegovu nameru i trude se da se usklade prema istoj.
CSAIL tim planira da usmeri svoje istraživanje ka adaptaciji strukture čamca u skladu sa objektima koji se na njemu transportuju. Osim toga, postoji mogućnost da bi ovi čamci mogli u budućnosti da se koriste i na otvorenim vodama, gde su spoljni uslovi manje kontrolisani.





Novi broj magazina „Biznis.rs” donosi brojne ekskluzivne poslovne priče, intervjue i dešavanja iz regiona i sveta…




